Humanoïde robotica (mensvormige robots met armen, benen, handen en kunstmatige intelligentie) nadert een kantelpunt. Jarenlang zag je deze systemen vooral op technologiebeurzen en in onderzoekslabs. Ze konden lopen, rennen en eenvoudig met mensen omgaan, maar waren nog niet klaar voor praktisch gebruik.
De eerste humanoïde robots lieten zien dat bepaalde menselijke bewegingen en interacties nagebootst kunnen worden in gecontroleerde omgevingen. Hun waarde was vooral experimenteel: het testen van sensoren, waarnemingssoftware en besturingssystemen die later gebruikt kunnen worden in toepassingen met directe commerciële waarde.
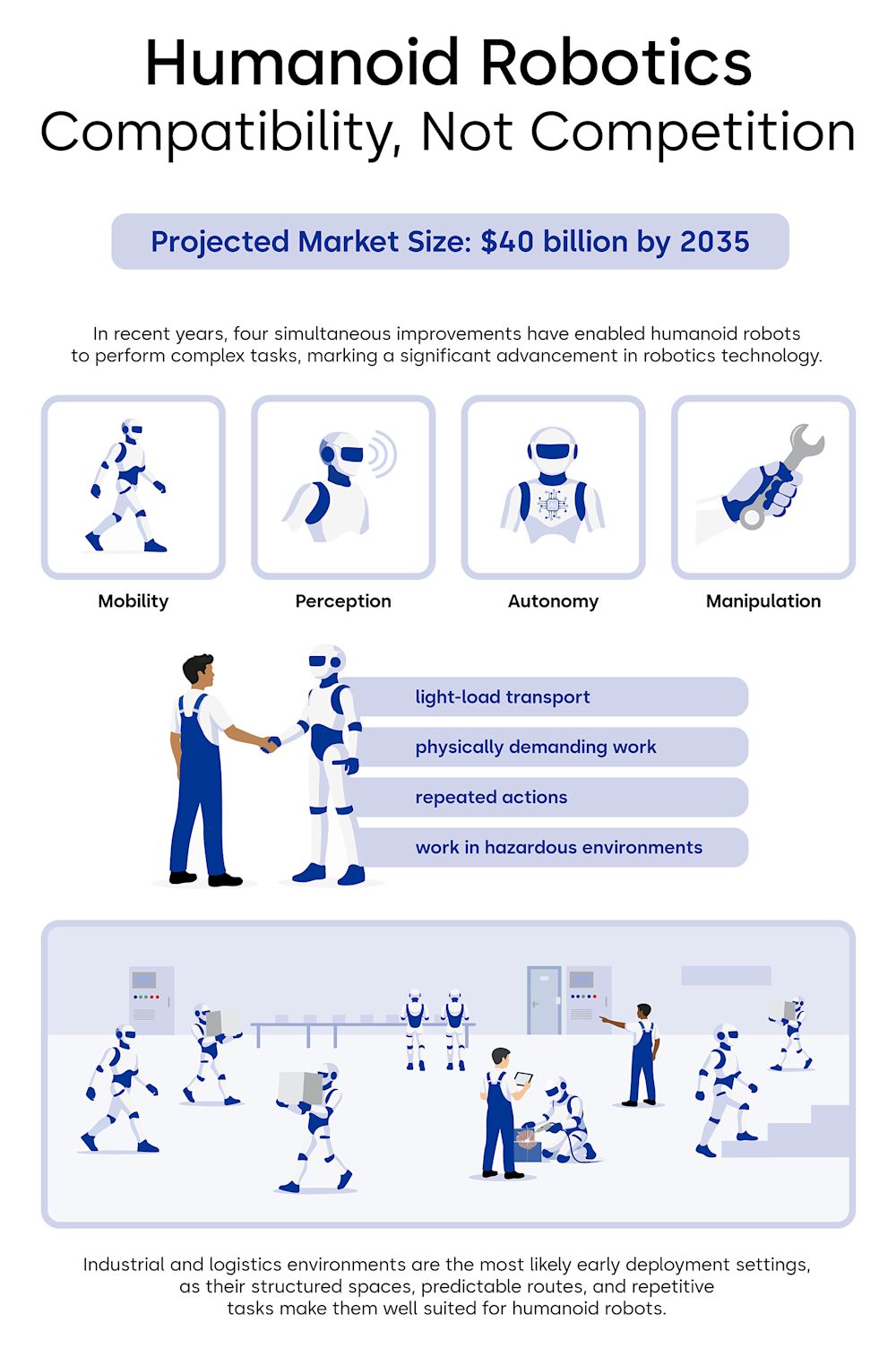
Vandaag is het gesprek veranderd. De markt voor humanoïde robotica is nu 2 tot 3 miljard dollar waard en kan groeien naar 40 miljard in 2035, met een potentieel van 200 miljard. De technische en zakelijke wereld discussiëren niet langer óf robots als mensen kunnen lopen, maar waar en hoe ze echte waarde opleveren.
De focus verschuift van technologisch spektakel naar praktische vragen: welke taken kun je betrouwbaar automatiseren? Welke kosten en veiligheidsnormen zijn nodig voor industrieel gebruik? Hoe werken autonome systemen samen met mensen op de werkvloer? En wat is de volgende stap?
Wat er veranderd in humanoïde robotica
De afgelopen jaren is de vooruitgang sterker samengekomen. Verbeteringen in mobiliteit, waarneming, autonomie en manipulatie versterken elkaar, waardoor humanoïde robots steeds complexere taken kunnen uitvoeren met weinig menselijke hulp. Sommige modellen worden al getest in fabrieken, bijvoorbeeld voor intern transport, materiaalverwerking en ondersteuning bij assemblage.
Deze sprong komt niet door één grote doorbraak, maar door het samenkomen van meerdere ontwikkelingen, vooral de evolutie van AI. Waar systemen vroeger sterk gespecialiseerd waren, kunnen ze nu beter generaliseren, zich aanpassen en beslissingen nemen in veranderende situaties. Robots werken daardoor niet meer alleen op basis van vaste regels, maar leren ook van praktijkdata, simulaties en menselijke voorbeelden.
Fysieke AI en geavanceerde hardware

De opkomst van ‘fysieke AI’ maakt dat deze systemen hun omgeving niet alleen waarnemen, maar ook begrijpen en ernaar handelen. Door beeld, taal en actie te combineren in machine-learningmodellen (en dankzij steeds krachtigere hardware) wordt de stap van begrijpen naar doen kleiner. Daardoor kunnen robots flexibeler opereren in omgevingen die voor mensen zijn gemaakt.
Tegelijk is hardware niet langer de grootste beperking. Vooruitgang in sensoren en besturing zorgt voor soepelere en nauwkeurigere bewegingen, beter evenwicht en meer controle bij het oppakken en verplaatsen van objecten. Lopen op twee benen blijft lastig, maar is veel stabieler dan tien jaar geleden. Daardoor kunnen humanoïde robots steeds meer taken in de praktijk uitvoeren.
Van algemene capaciteit naar nuttige taken

Een belangrijke verschuiving in humanoïde robotica is dat men afstand neemt van het idee van een robot die 'alles' kan. Dat komt niet zozeer door technische beperkingen, maar door een praktische realiteit: volledige veelzijdigheid is duur, lastig te certificeren en moeilijk in te passen in echte werkprocessen. Duidelijk afgebakende taken maken het juist mogelijk om prestaties te meten, investeringen te onderbouwen en aan veiligheidsnormen te voldoen.
Daarom werken de meeste humanoïde robots buiten het lab nu in specifieke rollen, met zo min mogelijk onvoorspelbaarheid. Zo kun je prestaties beter volgen, fouten sneller opsporen en het gebruik opschalen zonder grote risico’s. Veel toepassingen zitten nog in pilotfase, omdat er nog veel controle nodig is om ze betrouwbaar te laten werken.
De kracht van humanoïde robots zit niet alleen in hun menselijke vorm, maar vooral in hoe goed ze passen in onze bestaande omgeving. Ze kunnen werken in ruimtes die voor mensen zijn gemaakt, zonder dat alles aangepast hoeft te worden. Denk aan trappen, deuren, gereedschap en looproutes: wat voor mensen is ontworpen, werkt ook voor deze robots. Dat geeft ze een voordeel ten opzichte van gespecialiseerde robots die een aangepaste omgeving nodig hebben.
Waar je ze het eerst zult tegenkomen
Industriële en logistieke omgevingen zijn de meest voor de hand liggende plekken om te beginnen. Dit zijn overzichtelijke omgevingen met voorspelbare routes en herhalend werk. Humanoïde robots kunnen hier licht transport uitvoeren en fysieke belasting verminderen, vooral bij taken die steeds terugkomen en plaatsvinden in ruimtes die voor mensen zijn ingericht.
Ook bij onderhoud en inspectie in risicovolle omgevingen ligt potentie. In sectoren zoals energie en petrochemie kunnen robots gevaarlijke of moeilijk bereikbare plekken betreden, visuele data verzamelen en toezicht houden zonder dat mensen risico lopen. Dat kan werkplekken veiliger maken, al gebeurt dit vooral in landen met de middelen om zulke systemen goed te beveiligen en beheren.
In de zorg zijn er mogelijkheden, maar ook duidelijke grenzen. Humanoïde robots zullen zorgpersoneel niet vervangen, maar kunnen wel eenvoudige, ondersteunende taken uitvoeren. Juist daar kan de inzet zichtbaar en maatschappelijk acceptabel zijn.
In al deze gevallen is een stapsgewijze aanpak nodig: eerst kleinschalige pilots, daarna testen in de praktijk en pas opschalen als betrouwbaarheid, kosten en veiligheid op orde zijn.
Enkele beperkingen blijven het tempo vertragen

Ondanks de vooruitgang zijn er nog duidelijke beperkingen die grootschalige inzet vertragen. Energie is een belangrijke factor. Lopen op twee benen kost veel energie, waardoor de meeste humanoïde robots maar beperkt kunnen werken. Ze verbruiken meer stroom dan robots op wielen of vaste armen, wat gevolgen heeft voor werktijden, infrastructuur en hoe je ze inzet.
Ook de kosten spelen een grote rol. De prijs is flink gedaald: van zo’n 3 miljoen naar ongeveer 100.000 dollar per robot. Toch blijven onderhoud, certificering en integratie duur. Tegelijk groeit het aantal startups en fabrikanten snel, wat innovatie en concurrentie versnelt. Op de lange termijn hangt het succes af van de vraag of humanoïden beter of goedkoper kunnen werken dan eenvoudigere vormen van automatisering.
Daarnaast zijn er regels en ethische vragen. Wie is verantwoordelijk bij fouten of schade? Wat betekent dit voor werk en de overgang van werknemers? Welke taken kun je wel of niet overlaten aan autonome systemen? En hoe bescherm je privacy en voorkom je vooroordelen bij robots met sensoren en AI?
Een evolutie, geen sprong

De volgende fase van humanoïde robotica wordt niet bepaald door spectaculaire demo’s, maar door stillere en doorslaggevende factoren: betrouwbare inzet, goede integratie met bestaande systemen, voorspelbaar onderhoud en veilige samenwerking met mensen.
Er zal waarschijnlijk geen enkel 'iPhone-moment' zijn dat fabrieken, ziekenhuizen of huizen in één keer verandert. De ontwikkeling verloopt stap voor stap, met kleine verbeteringen en testen in de praktijk: eerst pilots, daarna gedeeltelijke inzet en pas later bredere toepassing. Uiteindelijk bepalen vooral betrouwbaarheid, autonomie en lagere kosten hoe snel humanoïde robots van belofte naar dagelijkse realiteit gaan.

Juan Carlos García Díaz
Juan Carlos is a journalist specializing in Technology and Innovation. He has served as editor-in-chief of the Ninten...